PROYECTO FINAL
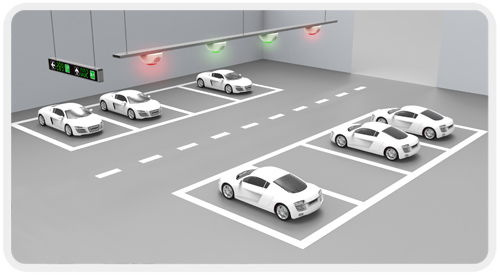
"Estacionamiento Inteligente"
- Utilizar al microcontrolador en aplicaciones de control electrónico.
- Desarrollar y ejecutar programas en un microcontrolador PIC.
- Programar y configurar interfaces básicas del microcontrolador.
- Poner en practica los conocimientos adquiridos en cuanto la programación de controladores PIC y Arduino.
2. OBJETIVOS:
4. MATERIALES Y EQUIPO:
- Diseñar un estacionamiento inteligente, a partir de los conocimientos adquiridos en el cursos de microcontroladores.
- Realizar la programación correspondiente al proyecto mediante el software y hardware Arduino.
- Implementar nuestro proyecto en un prototipo de pequeña escala, para demostrar el funcionamiento de nuestro proyecto.
En
la actualidad, los estacionamientos convencionales ubicados en los centros
comerciales, lugares públicos o el centro histórico de la ciudad de Arequipa,
sufren diversos inconvenientes al momento de ingresar con nuestro automóvil;
tales como: el número de espacios vacíos u ocupados, la fácil visualización de
un espacio libre o, el control de la entrada y salida de los autos que
ingresaron al estacionamiento. A partir de todos estos problemas presentes en
una ciudad con un parque automotor relativamente amplio como es el de Arequipa,
decidimos diseñar este proyecto, el "Estacionamiento Inteligente", con el objetivo de solucionar todos los problemas ya antes
mencionados.
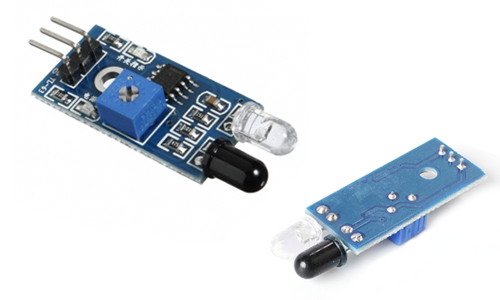
4.1. Sensor infrarrojo
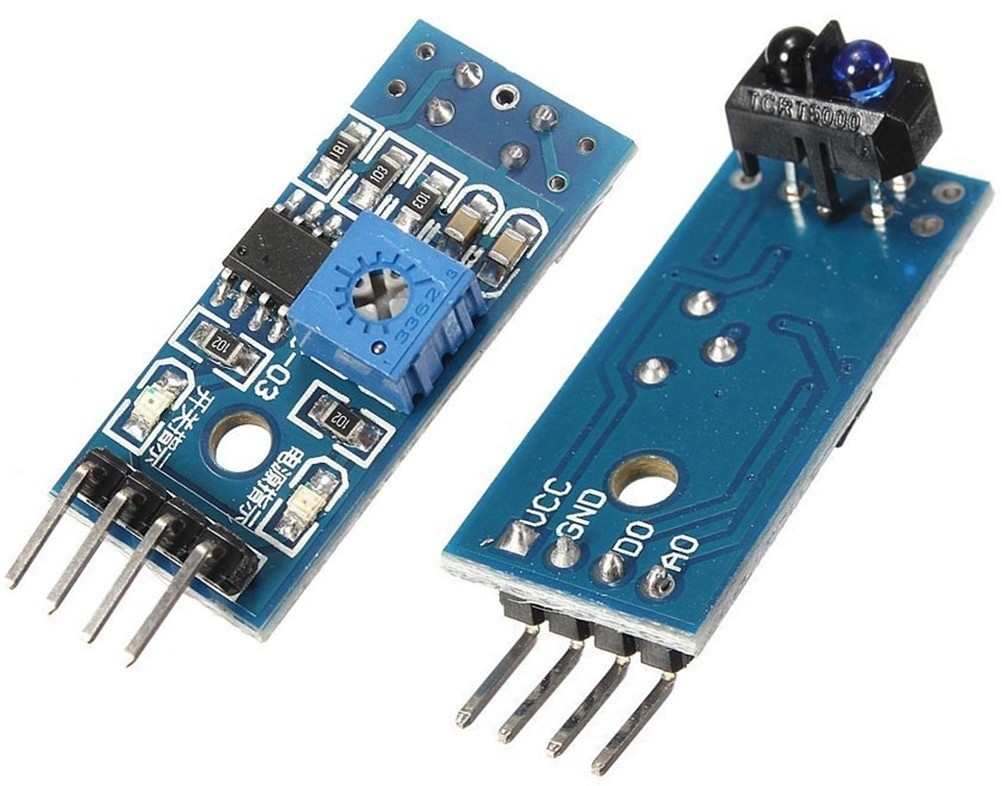
4.2. Sensor seguidor de línea




4.6. Jumpers

4.7. Foam

5. EVIDENCIAS DEL PROYECTO:
5.1. Avance #1
5.2. Avance #2
5.3. Avance #3
5.1. Avance #1
6. OBSERVACIONES:
- Para la elaboración de la maqueta, optamos por el material conocido como "foam"; ya que, es fácil de cortar y bastante resistente.
- El display es anodo por lo tanto se conectara a positivo.
- El sensor elegido para el proyecto, es el de seguidor de linea, funciona de tal manera que al detectar el carro se encenderá un led de un determinado color.
- El display tiene un "dp" que se conecta directamente a el hardware de Arduino.
7. CONCLUSIONES
- Tuvimos esta idea debido a que observamos que en los estacionamientos no se da una buena administración y poco orden, diseñamos un sistema de orden de carros y conteo.
- Arduino es una sencilla placa de entradas y salidas de señales digitales y analogicas.
- Arduino al ser un open-hardware, podemos hacer cualquier programación sin necesidad de una licencia.






